|
Project Summary
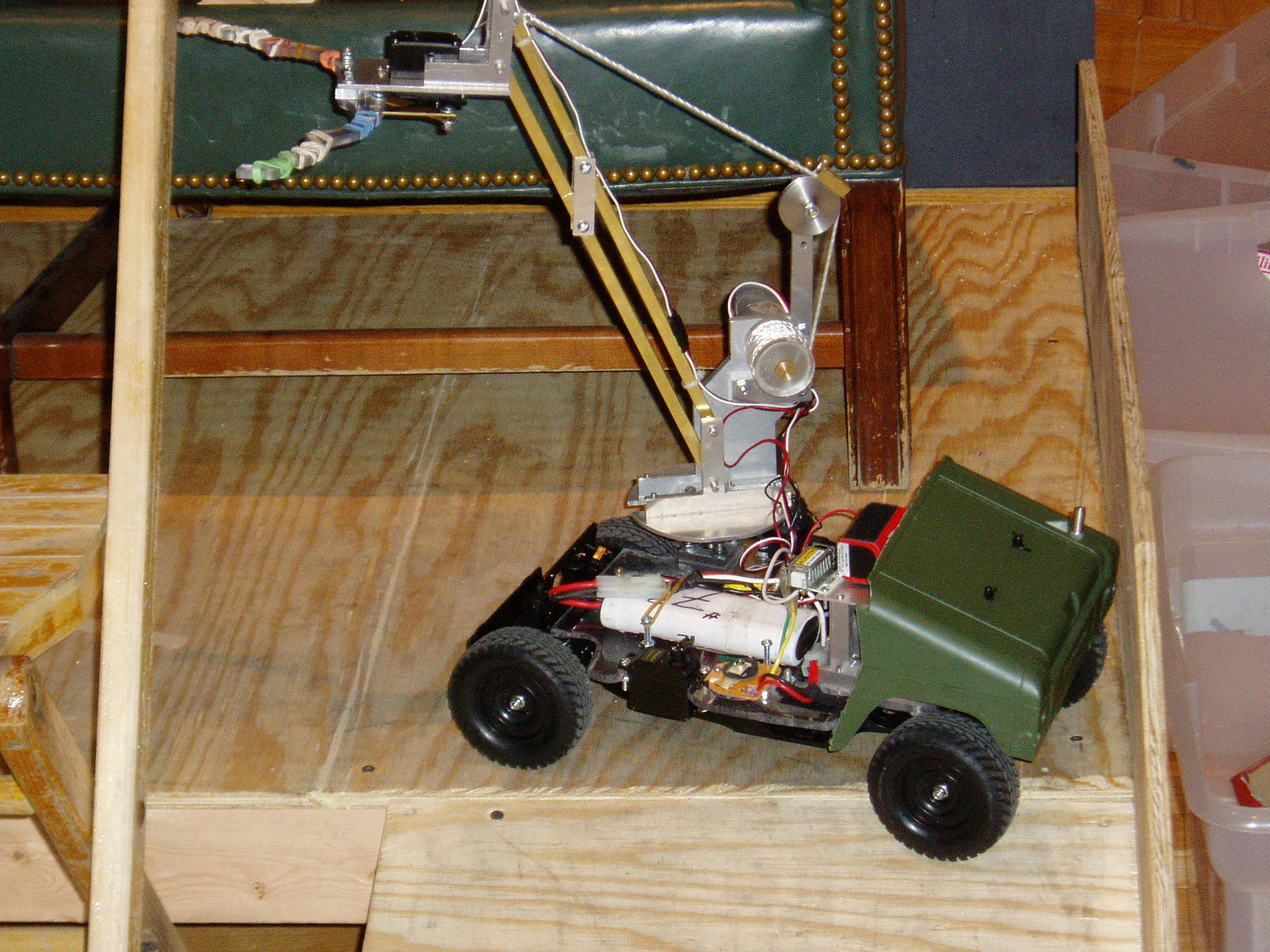
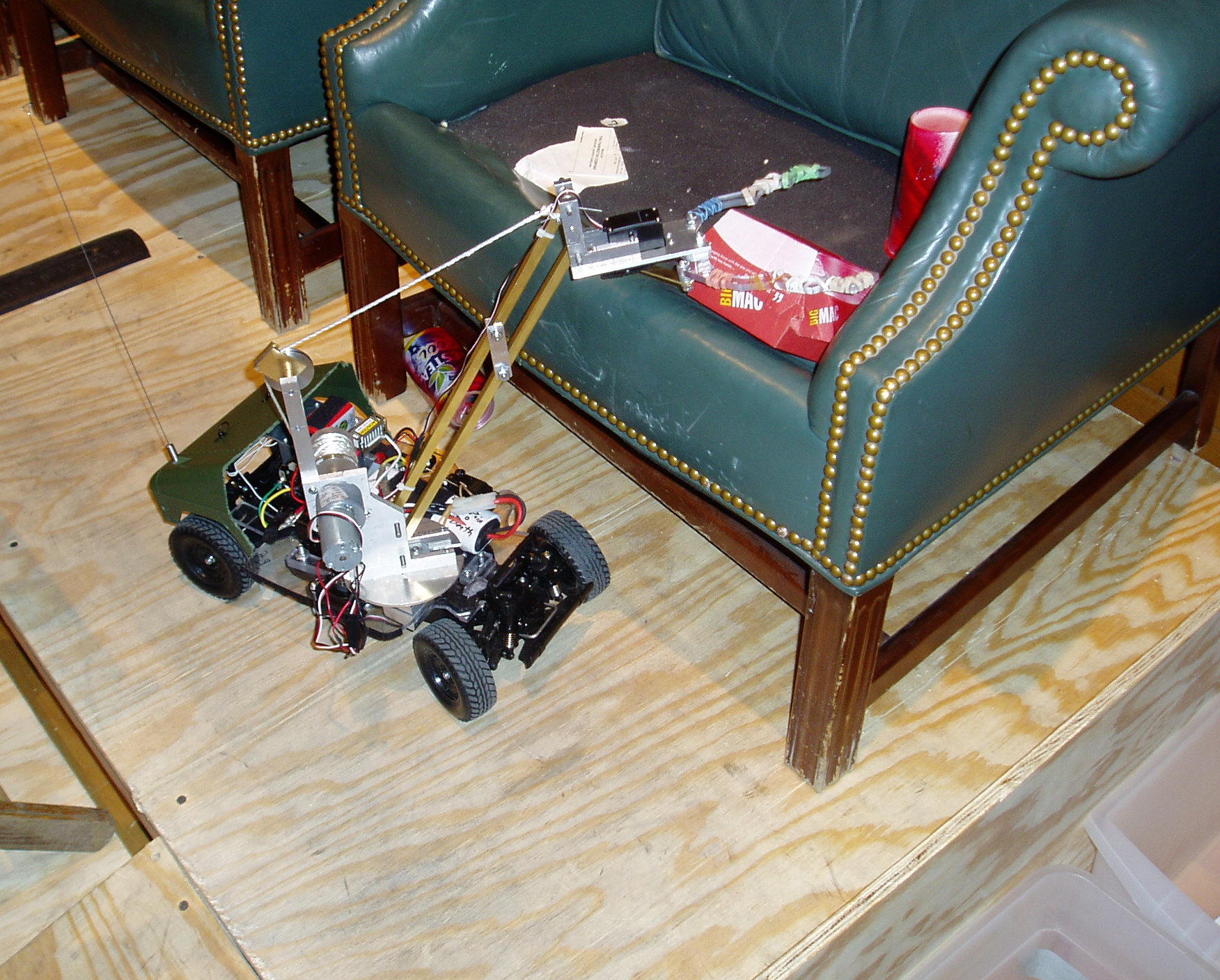
This R/C controlled robot has the capability of navigating a complicated course of benches,
chairs and ramps simulating an althletic stadium while collecting trash placed around the course. After collection, it
returns the trash to separate recylcling bins. Robots were to be designed, analyzed and constructed to complete the task.
|
|
Fall 2005
Class Project
Engineering Program/Methods Used:
- Pro-Engineer
- Thayer School Machine Shop
|
Project Description
This project was an eight week long project
in which I worked with a group of three peers. A large part of this project was to learn
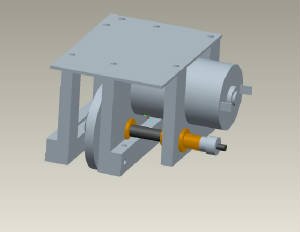
and become proficient at using Pro-Engineer designing software to create a design from start to finish. We had two main components
that had to be designed. First of all, we had to make the pre-packaged remote-controlled car travel at a speed one-sixth of
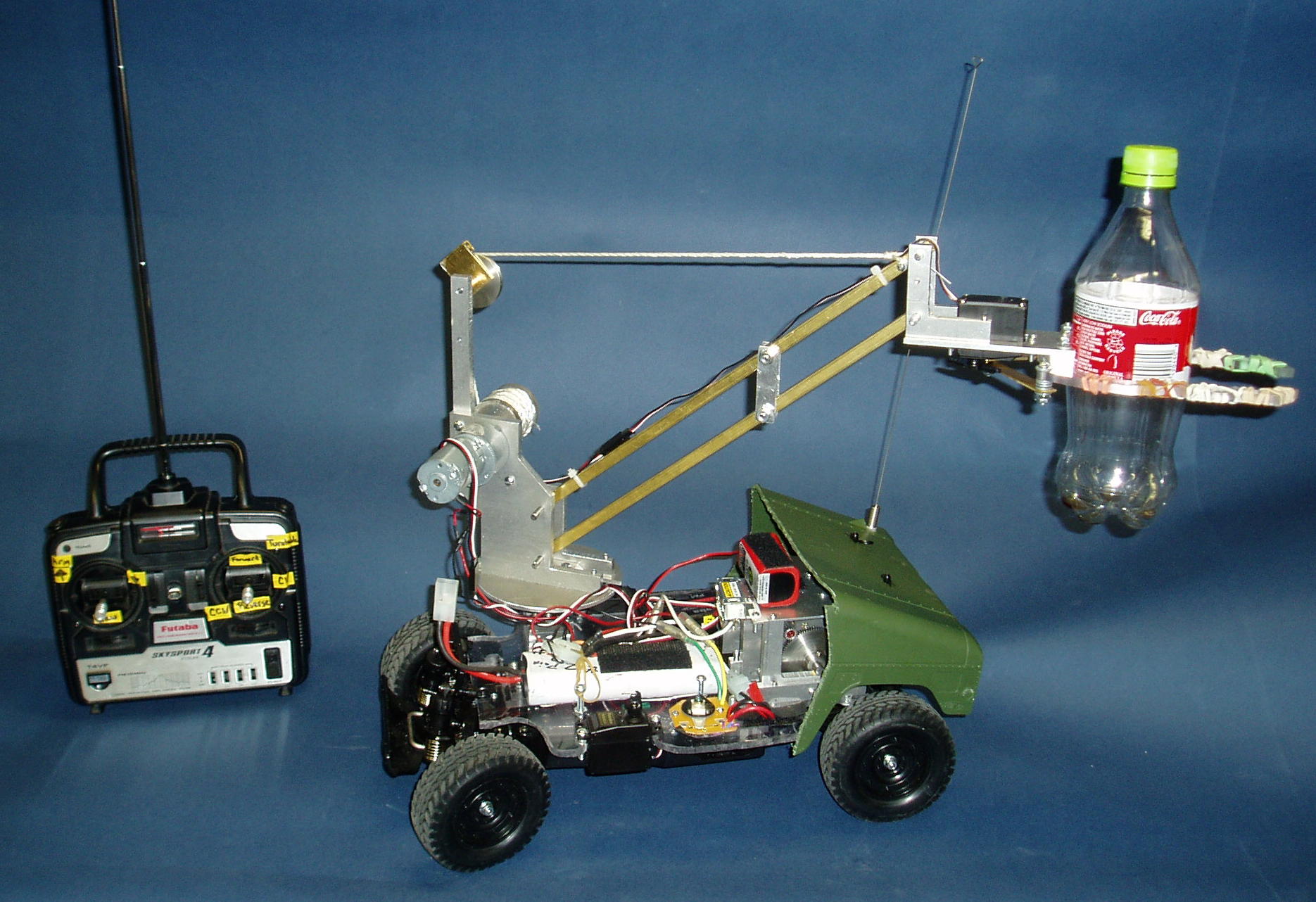
its initial specified speed. The second component we were concerned with was the trash retrieval mechanism for which
we got inspiration from a crane and desk lamp.
|
|
Competition
The main objective of this project was to design and build a remote-controlled vehicle that could be used to
pick up trash in athletic arenas, movie theaters, and other venues. The machine was designed to pick up, transport and dispose
of trash into their appropriate recycling containers.
|
|
|
|
Come competition day our design was very effective. It successfully completed the speed test. It also completed
two ten-minute sessions without faltering and placed third in our class for picking up the most trash.
|
|